En première approximation, si tu fermes une porte ouverte d'un angle de
$mathjax$\alpha=30°=\frac{\pi}{6} rad$mathjax$
en
$mathjax$\delta t=1 s$mathjax$
, elle tourne à une vitesse angulaire constante de
$mathjax$\omega = \frac{\alpha}{\delta t}=\frac{\pi}{6} rad.s^{-1}$mathjax$
.
L'énergie cinétique nécessaire pour effectuer cette rotation est donc
$mathjax$E_c=\frac{1}{2}J_{\Delta}\omega^2=\frac{1}{6}m\ell^2\omega^2$mathjax$
(où
$mathjax$\ell=130mm$mathjax$
est la largeur de la porte et
$mathjax$m=40g$mathjax$
est sa masse totale) et d'après le théorème de l'énergie cinétique, celle-ci est égale à la somme des travaux des forces en présence.
Si on néglige le travail de la force de frottement dynamique, il ne reste que celui de la force exercée sur la porte.
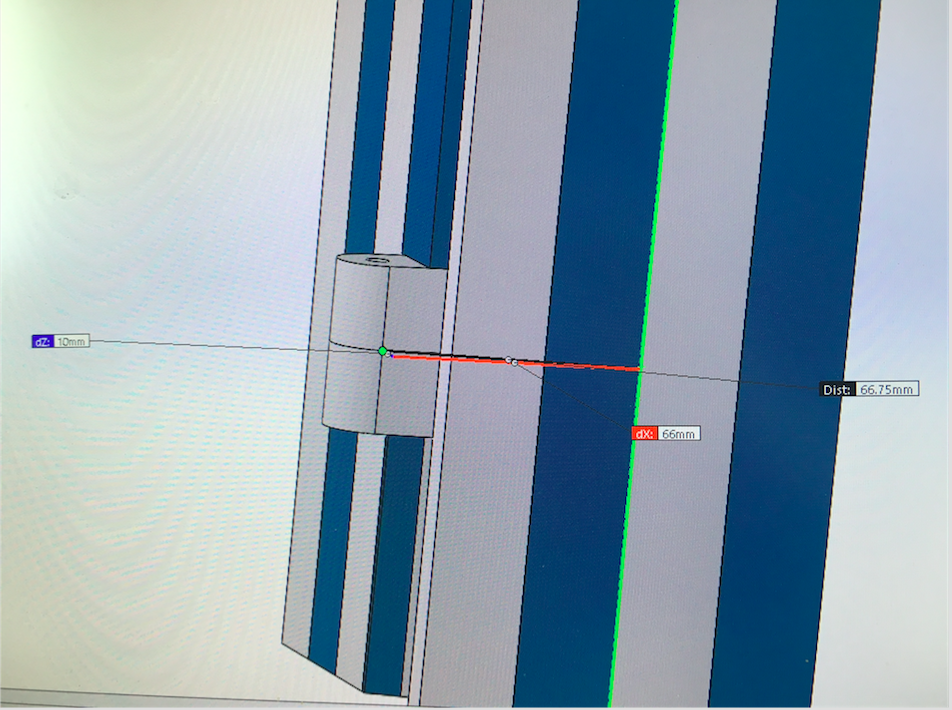
Si on considère que le robot ne tourne pas en même temps que la porte mais effectue une poussée perpendiculaire à l'encadrement de la porte, de force constante
$mathjax$F$mathjax$
, en un point située au milieu de la porte, on calcule que le travail effectué vaut
$mathjax$W=\int_{\alpha}^0 F \frac{\ell}{2}(-\cos(\theta)d\theta)=\frac{\sin(\alpha)}{2}F \ell$mathjax$
.
On en déduit que la force nécessaire est :
$mathjax$F=\dfrac{2W}{\sin(\alpha)\ell}=\dfrac{2E_c}{\sin(\alpha)\ell}=\dfrac{m\ell \alpha^2}{3\sin(\alpha)\delta t^2}\approx 0.95 mN$mathjax$
C'est donc FAUX !!
Les forces de frottement sont en effet plus importantes que cela puisque le coefficient de frottement bois-bois est (dans le meilleur des cas) égal à 0.25 donc la force de frottement statique est à peu près égale à
$mathjax$0.1 N$mathjax$
soit près de 100 fois plus grande que la force précédemment calculée.
Or il faut exercer une force supérieure à cette force de frottement pour rompre l'inertie... et c'est donc elle qui t'intéresse.
Bref, comme je te l'avait dit, la force mesurée par le dynamomètre correspond à la force de frottement statique (aux erreurs de mesure près...) et tu n'a pas besoin d'un calcul sophistiqué pour l'obtenir !