
formulaire mecanique
DownloadTélécharger
Actions
Vote :
ScreenshotAperçu
Informations
Catégorie :Category: mViewer GX Creator Lua TI-Nspire
Auteur Author: imene3434
Type : Classeur 3.6
Page(s) : 8
Taille Size: 684.33 Ko KB
Mis en ligne Uploaded: 24/03/2015 - 11:54:33
Uploadeur Uploader: imene3434 (Profil)
Téléchargements Downloads: 82
Visibilité Visibility: Archive publique
Shortlink : http://ti-pla.net/a176182
Type : Classeur 3.6
Page(s) : 8
Taille Size: 684.33 Ko KB
Mis en ligne Uploaded: 24/03/2015 - 11:54:33
Uploadeur Uploader: imene3434 (Profil)
Téléchargements Downloads: 82
Visibilité Visibility: Archive publique
Shortlink : http://ti-pla.net/a176182
Description
Formulaire de mécanique
La mécanique de Newton
Points de cours Explications ou utilisations
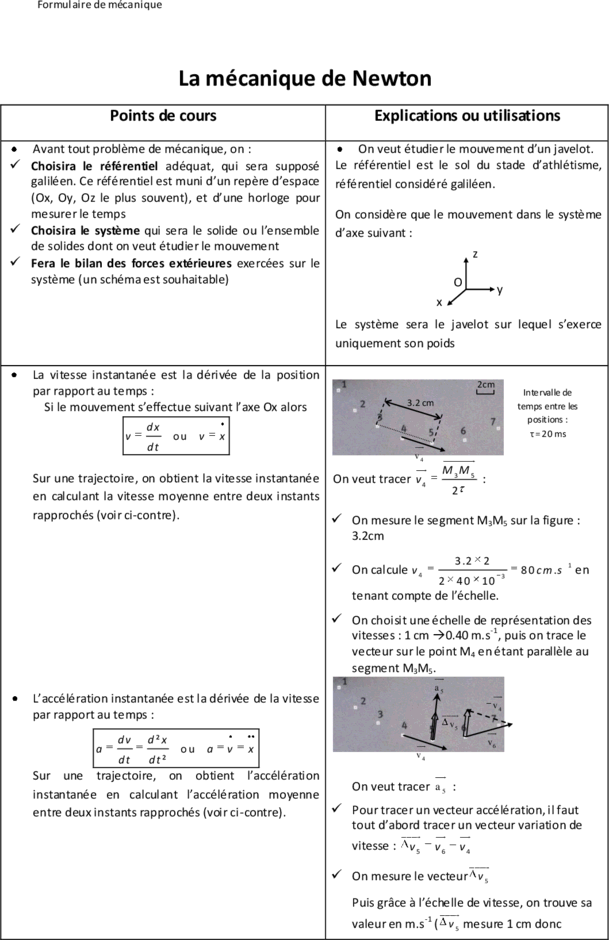
Avant tout problème de mécanique, on : On veut étudier le mouvement d’un javelot.
Choisira le référentiel adéquat, qui sera supposé Le référentiel est le sol du stade d’athlétisme,
galiléen. Ce référentiel est muni d’un repère d’espace référentiel considéré galiléen.
(Ox, Oy, Oz le plus souvent), et d’une horloge pour
mesurer le temps On considère que le mouvement dans le système
Choisira le système qui sera le solide ou l’ensemble d’axe suivant :
de solides dont on veut étudier le mouvement
z
Fera le bilan des forces extérieures exercées sur le
système (un schéma est souhaitable) O
y
x
Le système sera le javelot sur lequel s’exerce
uniquement son poids
La vitesse instantanée est la dérivée de la position
2cm
par rapport au temps : Intervalle de
3.2 cm
Si le mouvement s’effectue suivant l’axe Ox alors temps entre les
positions :
dx
v ou v x τ = 20 ms
dt
v4
M 3M 5
Sur une trajectoire, on obtient la vitesse instantanée On veut tracer v 4 :
en calculant la vitesse moyenne entre deux instants 2
rapprochés (voir ci-contre). On mesure le segment M3M5 sur la figure :
3.2cm
3.2 2
On calcule v 4 3
80 cm . s
1
en
2 40 10
tenant compte de l’échelle.
On choisit une échelle de représentation des
vitesses : 1 cm 0.40 m.s-1, puis on trace le
vecteur sur le point M4 en étant parallèle au
segment M3M5 .
a5
L’accélération instantanée est la dérivée de la vitesse
v4
par rapport au temps :
v5
dv d ²x v6
a ou a v x v4
dt dt ²
Sur une trajectoire, on obtient l’accélération
On veut tracer a 5 :
instantanée en calculant l’accélération moyenne
entre deux instants rapprochés (voir ci-contre). Pour tracer un vecteur accélération, il faut
tout d’abord tracer un vecteur variation de
vitesse : v5 v6 v4
On mesure le vecteur v5
Puis grâce à l’échelle de vitesse, on trouve sa
valeur en m.s-1 ( v 5 mesure 1 cm donc
Formulaire de mécanique
-1
v 5 =0.40 m.s )
0.40
On calcule : a 5 3
5 m .s
2
2 40 10
On choisit une échelle d’accélération pour
tracer ce vecteur (1 cm 2.5 m.s-2)
(a 5 a même sens, même direction que v 5 )
Voici l’énoncé des trois lois de Newton : La première loi de Newton est incluse dans la
1ère : principe d’inertie : tout corps persévère dans seconde : si Fext =0 alors a
cste ce qui
son état de repos ou de mouvement rectiligne
uniforme si les forces qui s’exercent sur lui se correspond à l’état de repos a0 ou au
compensent (l’ « état » du corps dépend des mouvement rectiligne uniforme a 0.
conditions initiales).
2ème : principe fondamentale de la dynamique :
Fext =ma
Très importante, c’est elle qui permettra d’avoir les
équations du mouvement d’un système (équation
différentielle, équation de trajectoire, …)
3ème : principe d’action réaction :
FA / B FB / A
Chutes verticales de solide
Points de cours Explications ou utilisations
Les forces qui peuvent s’appliquer à un système en Une bille chute dans z’
chute libre au voisinage de la Terre sont les un fluide :
O
suivantes : F m a Pi
f
Le poids du système, égale à la force d’attraction de la
Bille
dv
Terre sur ce système : m P f
m MT dt
P m g FT / S G 2
u
RT h
On projette suivant l’axe P
z eau
a ve c u ve cte u r u n ita ire d irigé
d u systè m e ve rs le ce n tre d e la Te rre
z’Oz :
dv
MT 1 1
m ( f
) g V k v
g G 2
9.80 m . s o u N . kg dt
RT h La bille étant totalement immergé, le même
Rq : On pourra avoir besoin d ‘exprimer la masse en volume apparaît dans l’expression du poids et de
fonction de la masse volumique du système : m=ρ×V la poussée d’archimède .
La poussée d’archimède égale au poids du volume de
On peut exprimer à partir de cette équation
fluide déplacé
différentielle la vitesse limite :
Vdéplacé g
fluide
Quand on l’a atteinte, dv/dt = 0 d’où :
est dirigée en sens inverse du poids. dv
m 0 ( f
) g V k v lim
dt
Formulaire de mécanique
La force de frottement fluide : ( f
) g V
f = k×v ou f = k×v² Ainsi v lim
k
Cette force est dirigée en sens inverse du
On peut obtenir le temps caractéristique de
mouvement. la chute par une méthode graphique :
La méthode d’Euler permet d’obtenir par une Avec cette méthode d’Euler, on obtient les
succession de calculs identique, l’allure d’une valeurs de v0 , v1, v2, …, vn pour des temps t0,
fonction à partir de l’équation différentielle : t1, t2, …, tn. On peut donc tracer une allure de
Pour équation différentielle de ce type : v=f(t) avec toutes ces valeurs.
dv
av b L’intérêt de la méthode d’Euler et de pouvoir
dt
Si on prend un δt suffisamment petit on peut écrire : tracer différentes allures de v=f(t) : on peut
v
ainsi voir les influences des masses
av b volumique (bille et fluide), de l’expression de
t
la force de frottements fluide …
On peut donc calculer la variation de vitesse δv
pendant le temps δt :
v av b t
Ainsi si on connaît a, b et v0, on peut choisir δt pour
calculer :
v1 v0 v v0 av 0 b t
v2 v1 v v1 av 1 b t
Pour une chute verticale sans frottement, On retrouve ici le fait que l’accélération d’un
l’accélération est égale à l’accélération de la système en chute libre (qui n’est soumis qu’à
pesanteur : a g son poids) est indépendante de sa masse (un
Si on projette une nouvelle fois sur un axe vertical Oz marteau et une plume tomberait de la même
hauteur en même temps)
dirigé vers le bas :
dv
a g ; co m m e a , e n in té gra n t : On peut obtenir la valeur e la vitesse lors de
dt l’arrivée au sol :
v (t ) gt cste . Si v (t 0) 0 a lo rs cste 0 Pour une altitude de chute h :
dz 2h
Com m e v , e n in té gra n t : h 1/2 g t² d 'où t
dt g
z (t ) 1 /2 g t² cste '. Si z (t 0) 0 a lo rs cste ' 0
v g t 2g h
Finalement :
a g ; v (t ) g t ; z (t ) 1 /2 g t²
Formulaire de mécanique
Mouvement d’un projectile
Points de cours
Référentiel : les pieds immobiles du joueur, référentiel terrestre supposé galiléen.
Système : la boule de pétanque
Force : le poids de la boule
2ème loi de Newton : a g
On va projeter cette relation sur les 3 axes :
Sur Ox Sur Oy Sur Oz
---------------------------- ---------------------------- ----------------------------
ax = 0 ay = 0 az=- g
---------------------------- ---------------------------- ----------------------------
d’où en primitivant : d’où en primitivant : d’où en primitivant :
vx = cste 1 vy = cste 2 vz = -g×t + cste 3
CI : vx(t=0) = 0 = cste 1 CI : vy(t=0) = v0×cos α = cste 2 CI : vz(t=0) = cste 3 = v0×sin α
d’où vx(t) = 0 d’où vy(t)= v0×cos α d’où vz(t) = -g×t + v0 ×sin α
---------------------------- ---------------------------- ----------------------------
D’où en primitivant : D’où en primitivant : D’où en primitivant :
x = cste 4=x(t=0)=0 y= v0×cos α×t + cste 5 z=-1/2×g×t² + v0×sin α×t + cste 6
d’où x(t)=0 CI : y(t=0)=0=cste 5 CI : z(t=0)=OA=cste 6
d’où y(t)= v0×cos α×t (1) d’où z(t)=-1/2×g×t² + v0×sin α×t + OA (2)
Il n’y a pas de mouvement Grâce à ces deux équations, on peut obtenir l’équation dela trajectoire :
suivant l’axe Ox, le mouvement y
est plan, dans le plan yOz. (1) Nous donne t
v0 co s
t²
On remplace dans (2) : z ( y ) 1 / 2 g v0 tan y OA
v 0 ² cos ²
2 autres notions sont à connaître : Flèche
On appelle la flèche la position la plus haute de la trajectoire : dans cette
position, l’altitude du projectile est maximale, sa vitesse verticale est nulle.
La mécanique de Newton
Points de cours Explications ou utilisations
Avant tout problème de mécanique, on : On veut étudier le mouvement d’un javelot.
Choisira le référentiel adéquat, qui sera supposé Le référentiel est le sol du stade d’athlétisme,
galiléen. Ce référentiel est muni d’un repère d’espace référentiel considéré galiléen.
(Ox, Oy, Oz le plus souvent), et d’une horloge pour
mesurer le temps On considère que le mouvement dans le système
Choisira le système qui sera le solide ou l’ensemble d’axe suivant :
de solides dont on veut étudier le mouvement
z
Fera le bilan des forces extérieures exercées sur le
système (un schéma est souhaitable) O
y
x
Le système sera le javelot sur lequel s’exerce
uniquement son poids
La vitesse instantanée est la dérivée de la position
2cm
par rapport au temps : Intervalle de
3.2 cm
Si le mouvement s’effectue suivant l’axe Ox alors temps entre les
positions :
dx
v ou v x τ = 20 ms
dt
v4
M 3M 5
Sur une trajectoire, on obtient la vitesse instantanée On veut tracer v 4 :
en calculant la vitesse moyenne entre deux instants 2
rapprochés (voir ci-contre). On mesure le segment M3M5 sur la figure :
3.2cm
3.2 2
On calcule v 4 3
80 cm . s
1
en
2 40 10
tenant compte de l’échelle.
On choisit une échelle de représentation des
vitesses : 1 cm 0.40 m.s-1, puis on trace le
vecteur sur le point M4 en étant parallèle au
segment M3M5 .
a5
L’accélération instantanée est la dérivée de la vitesse
v4
par rapport au temps :
v5
dv d ²x v6
a ou a v x v4
dt dt ²
Sur une trajectoire, on obtient l’accélération
On veut tracer a 5 :
instantanée en calculant l’accélération moyenne
entre deux instants rapprochés (voir ci-contre). Pour tracer un vecteur accélération, il faut
tout d’abord tracer un vecteur variation de
vitesse : v5 v6 v4
On mesure le vecteur v5
Puis grâce à l’échelle de vitesse, on trouve sa
valeur en m.s-1 ( v 5 mesure 1 cm donc
Formulaire de mécanique
-1
v 5 =0.40 m.s )
0.40
On calcule : a 5 3
5 m .s
2
2 40 10
On choisit une échelle d’accélération pour
tracer ce vecteur (1 cm 2.5 m.s-2)
(a 5 a même sens, même direction que v 5 )
Voici l’énoncé des trois lois de Newton : La première loi de Newton est incluse dans la
1ère : principe d’inertie : tout corps persévère dans seconde : si Fext =0 alors a
cste ce qui
son état de repos ou de mouvement rectiligne
uniforme si les forces qui s’exercent sur lui se correspond à l’état de repos a0 ou au
compensent (l’ « état » du corps dépend des mouvement rectiligne uniforme a 0.
conditions initiales).
2ème : principe fondamentale de la dynamique :
Fext =ma
Très importante, c’est elle qui permettra d’avoir les
équations du mouvement d’un système (équation
différentielle, équation de trajectoire, …)
3ème : principe d’action réaction :
FA / B FB / A
Chutes verticales de solide
Points de cours Explications ou utilisations
Les forces qui peuvent s’appliquer à un système en Une bille chute dans z’
chute libre au voisinage de la Terre sont les un fluide :
O
suivantes : F m a Pi
f
Le poids du système, égale à la force d’attraction de la
Bille
dv
Terre sur ce système : m P f
m MT dt
P m g FT / S G 2
u
RT h
On projette suivant l’axe P
z eau
a ve c u ve cte u r u n ita ire d irigé
d u systè m e ve rs le ce n tre d e la Te rre
z’Oz :
dv
MT 1 1
m ( f
) g V k v
g G 2
9.80 m . s o u N . kg dt
RT h La bille étant totalement immergé, le même
Rq : On pourra avoir besoin d ‘exprimer la masse en volume apparaît dans l’expression du poids et de
fonction de la masse volumique du système : m=ρ×V la poussée d’archimède .
La poussée d’archimède égale au poids du volume de
On peut exprimer à partir de cette équation
fluide déplacé
différentielle la vitesse limite :
Vdéplacé g
fluide
Quand on l’a atteinte, dv/dt = 0 d’où :
est dirigée en sens inverse du poids. dv
m 0 ( f
) g V k v lim
dt
Formulaire de mécanique
La force de frottement fluide : ( f
) g V
f = k×v ou f = k×v² Ainsi v lim
k
Cette force est dirigée en sens inverse du
On peut obtenir le temps caractéristique de
mouvement. la chute par une méthode graphique :
La méthode d’Euler permet d’obtenir par une Avec cette méthode d’Euler, on obtient les
succession de calculs identique, l’allure d’une valeurs de v0 , v1, v2, …, vn pour des temps t0,
fonction à partir de l’équation différentielle : t1, t2, …, tn. On peut donc tracer une allure de
Pour équation différentielle de ce type : v=f(t) avec toutes ces valeurs.
dv
av b L’intérêt de la méthode d’Euler et de pouvoir
dt
Si on prend un δt suffisamment petit on peut écrire : tracer différentes allures de v=f(t) : on peut
v
ainsi voir les influences des masses
av b volumique (bille et fluide), de l’expression de
t
la force de frottements fluide …
On peut donc calculer la variation de vitesse δv
pendant le temps δt :
v av b t
Ainsi si on connaît a, b et v0, on peut choisir δt pour
calculer :
v1 v0 v v0 av 0 b t
v2 v1 v v1 av 1 b t
Pour une chute verticale sans frottement, On retrouve ici le fait que l’accélération d’un
l’accélération est égale à l’accélération de la système en chute libre (qui n’est soumis qu’à
pesanteur : a g son poids) est indépendante de sa masse (un
Si on projette une nouvelle fois sur un axe vertical Oz marteau et une plume tomberait de la même
hauteur en même temps)
dirigé vers le bas :
dv
a g ; co m m e a , e n in té gra n t : On peut obtenir la valeur e la vitesse lors de
dt l’arrivée au sol :
v (t ) gt cste . Si v (t 0) 0 a lo rs cste 0 Pour une altitude de chute h :
dz 2h
Com m e v , e n in té gra n t : h 1/2 g t² d 'où t
dt g
z (t ) 1 /2 g t² cste '. Si z (t 0) 0 a lo rs cste ' 0
v g t 2g h
Finalement :
a g ; v (t ) g t ; z (t ) 1 /2 g t²
Formulaire de mécanique
Mouvement d’un projectile
Points de cours
Référentiel : les pieds immobiles du joueur, référentiel terrestre supposé galiléen.
Système : la boule de pétanque
Force : le poids de la boule
2ème loi de Newton : a g
On va projeter cette relation sur les 3 axes :
Sur Ox Sur Oy Sur Oz
---------------------------- ---------------------------- ----------------------------
ax = 0 ay = 0 az=- g
---------------------------- ---------------------------- ----------------------------
d’où en primitivant : d’où en primitivant : d’où en primitivant :
vx = cste 1 vy = cste 2 vz = -g×t + cste 3
CI : vx(t=0) = 0 = cste 1 CI : vy(t=0) = v0×cos α = cste 2 CI : vz(t=0) = cste 3 = v0×sin α
d’où vx(t) = 0 d’où vy(t)= v0×cos α d’où vz(t) = -g×t + v0 ×sin α
---------------------------- ---------------------------- ----------------------------
D’où en primitivant : D’où en primitivant : D’où en primitivant :
x = cste 4=x(t=0)=0 y= v0×cos α×t + cste 5 z=-1/2×g×t² + v0×sin α×t + cste 6
d’où x(t)=0 CI : y(t=0)=0=cste 5 CI : z(t=0)=OA=cste 6
d’où y(t)= v0×cos α×t (1) d’où z(t)=-1/2×g×t² + v0×sin α×t + OA (2)
Il n’y a pas de mouvement Grâce à ces deux équations, on peut obtenir l’équation dela trajectoire :
suivant l’axe Ox, le mouvement y
est plan, dans le plan yOz. (1) Nous donne t
v0 co s
t²
On remplace dans (2) : z ( y ) 1 / 2 g v0 tan y OA
v 0 ² cos ²
2 autres notions sont à connaître : Flèche
On appelle la flèche la position la plus haute de la trajectoire : dans cette
position, l’altitude du projectile est maximale, sa vitesse verticale est nulle.


, reçois gratuitement 1 exemplaire de test de la TI-82 Advanced Edition Python. À demander d'ici le 31 décembre 2024.")





