
SI liaisons mécaniques
DownloadTélécharger
Actions
Vote :
ScreenshotAperçu
Informations
Catégorie :Category: mViewer GX Creator Lua TI-Nspire
Auteur Author: tsea
Type : Classeur 3.6
Page(s) : 1
Taille Size: 89.39 Ko KB
Mis en ligne Uploaded: 29/03/2015 - 16:00:14
Uploadeur Uploader: tsea (Profil)
Téléchargements Downloads: 1382
Visibilité Visibility: Archive publique
Shortlink : http://ti-pla.net/a179326
Type : Classeur 3.6
Page(s) : 1
Taille Size: 89.39 Ko KB
Mis en ligne Uploaded: 29/03/2015 - 16:00:14
Uploadeur Uploader: tsea (Profil)
Téléchargements Downloads: 1382
Visibilité Visibility: Archive publique
Shortlink : http://ti-pla.net/a179326
Description
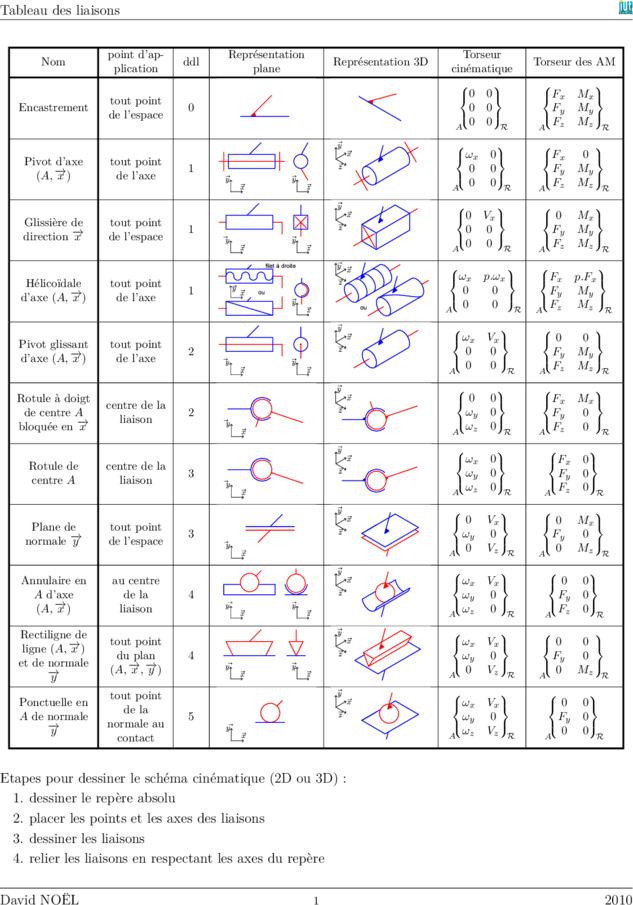
Tableau des liaisons
point d’ap- Représentation Torseur
Nom ddl Représentation 3D Torseur des AM
plication plane cinématique
0 0 Fx Mx
tout point
Encastrement 0 0 0 Fy My
de l’espace
0 0 R Fz Mz R
A A
y
x ωx 0 Fx 0
Pivot d’axe tout point
1 z 0 0 Fy My
(A, →
−
x) de l’axe y y
0 0 R Fz Mz R
x z A A
y
x 0 Vx 0 Mx
Glissière de tout point z
1 0 0 Fy My
direction →
−x de l’espace y y
0 0 R Fz Mz R
x z A A
filet à droite y x
ωx p.ωx Fx p.Fx
Hélicoïdale tout point y
z
1 0 0 Fy My
d’axe (A, →
− x ou
x) de l’axe y 0 0 R Fz Mz R
ou
z A A
y
x ωx Vx 0 0
Pivot glissant tout point z
2 0 0 Fy My
d’axe (A, →−
x) de l’axe y y
0 0 R Fz Mz R
x z A A
y
Rotule à doigt x 0 0 Fx Mx
centre de la
de centre A 2 z ωy 0 Fy 0
liaison
bloquée en →
−x y ωz 0 R Fz 0 R
x A A
y
x ωx 0 Fx 0
Rotule de centre de la
3 z ωy 0 Fy 0
centre A liaison y ωz 0 R Fz 0 R
x A A
y
x 0 Vx 0 Mx
Plane de tout point
3 z ωy 0 Fy 0
normale →
−
y de l’espace y 0 Vz R 0 Mz R
x A A
y
Annulaire en au centre x ωx Vx 0 0
A d’axe de la 4 z ωy 0 Fy 0
(A, →
−
x) liaison y y
ωz 0 R Fz 0 R
x z A A
Rectiligne de y
tout point x ωx Vx 0 0
ligne (A, →
−
x)
du plan 4 z ωy 0 Fy 0
et de normale
(A, →
−
x,→−
y) y y
0 Vz R 0 Mz R
→
−
y x z A A
tout point y
Ponctuelle en x ωx Vx 0 0
de la
A de normale 5 z ωy 0 Fy 0
→
− normale au y
y ωz Vz R 0 0 R
contact x A A
Etapes pour dessiner le schéma cinématique (2D ou 3D) :
1. dessiner le repère absolu
2. placer les points et les axes des liaisons
3. dessiner les liaisons
4. relier les liaisons en respectant les axes du repère
David NOËL 1 2010
point d’ap- Représentation Torseur
Nom ddl Représentation 3D Torseur des AM
plication plane cinématique
0 0 Fx Mx
tout point
Encastrement 0 0 0 Fy My
de l’espace
0 0 R Fz Mz R
A A
y
x ωx 0 Fx 0
Pivot d’axe tout point
1 z 0 0 Fy My
(A, →
−
x) de l’axe y y
0 0 R Fz Mz R
x z A A
y
x 0 Vx 0 Mx
Glissière de tout point z
1 0 0 Fy My
direction →
−x de l’espace y y
0 0 R Fz Mz R
x z A A
filet à droite y x
ωx p.ωx Fx p.Fx
Hélicoïdale tout point y
z
1 0 0 Fy My
d’axe (A, →
− x ou
x) de l’axe y 0 0 R Fz Mz R
ou
z A A
y
x ωx Vx 0 0
Pivot glissant tout point z
2 0 0 Fy My
d’axe (A, →−
x) de l’axe y y
0 0 R Fz Mz R
x z A A
y
Rotule à doigt x 0 0 Fx Mx
centre de la
de centre A 2 z ωy 0 Fy 0
liaison
bloquée en →
−x y ωz 0 R Fz 0 R
x A A
y
x ωx 0 Fx 0
Rotule de centre de la
3 z ωy 0 Fy 0
centre A liaison y ωz 0 R Fz 0 R
x A A
y
x 0 Vx 0 Mx
Plane de tout point
3 z ωy 0 Fy 0
normale →
−
y de l’espace y 0 Vz R 0 Mz R
x A A
y
Annulaire en au centre x ωx Vx 0 0
A d’axe de la 4 z ωy 0 Fy 0
(A, →
−
x) liaison y y
ωz 0 R Fz 0 R
x z A A
Rectiligne de y
tout point x ωx Vx 0 0
ligne (A, →
−
x)
du plan 4 z ωy 0 Fy 0
et de normale
(A, →
−
x,→−
y) y y
0 Vz R 0 Mz R
→
−
y x z A A
tout point y
Ponctuelle en x ωx Vx 0 0
de la
A de normale 5 z ωy 0 Fy 0
→
− normale au y
y ωz Vz R 0 0 R
contact x A A
Etapes pour dessiner le schéma cinématique (2D ou 3D) :
1. dessiner le repère absolu
2. placer les points et les axes des liaisons
3. dessiner les liaisons
4. relier les liaisons en respectant les axes du repère
David NOËL 1 2010


, reçois gratuitement 1 exemplaire de test de la TI-82 Advanced Edition Python. À demander d'ici le 31 décembre 2024.")





